Date: 28 November 2014Equipment: DogeShip Rev 1 (aka DS-1)
Launch: Ludlow, VT
Landing: Nashua, NH (targeted)
Time of Flight: >2, < ∞ hours
Distance Traveled: >200 miles
Burst Altitude: Unknown
Payload Status: Likely floating off the coast of Nova Scotia
Date: 28 November 2014Equipment: DogeShip Rev 1 (aka DS-1)
Launch: Ludlow, VT
Landing: Nashua, NH (targeted)
Time of Flight: >2, < ∞ hours
Distance Traveled: >200 miles
Burst Altitude: Unknown
Payload Status: Likely floating off the coast of Nova Scotia
I vigorously rubbed my hands together to stave off the frigid winds of a late November Vermont - the weather forecast had called for clear skies and calm winds, but the reality that we came upon was far from it. To my left Brian knelt in a freshly plowed parking lot, holding a rapidly expanding weather balloon whipping around dangerously in the wind. This stage of flight is the most dangerous for the mission - one wrong gust of wind could cause the balloon to bend too severely and break or, worse yet, be torn from our hands, doomed to a quick climb with our payload still on the ground. I was working quickly to prepare our payload for its voyage into the upper reaches of Earth's atmosphere, working against the clock to release the balloon as soon as it was inflated and with enough battery to last to landing. We were confident in our planning - our first launch will be a success!
Mission Objectives:
- Launch a weather balloon and payload into (near) space
- Verify telemetry - a signal to get information about the spacecraft - works and is useful
- Recover the spacecraft
Our goal was and still is to be able to reliably launch a space balloon on a small budget, aiming to develop a machine that could be launched by anybody who truly wants to. The culmination of a few months of research and planning resulted in this launch of what has come to be called the DogeShip-class spacecraft.
The Doge is a rugged and simple ship made of completely 'off the shelf' parts. The system is essentially a cell phone placed into a cooler with a camera duct-taped to the side. The cell phone is running a Python script which report back the balloon’s current position and altitude. Additionally, the phone acts as a flight data recorder (FDR), saving off position, altitude, time, acceleration, and magnetometer information every second. The hope is that the simplicity of the system, along with some pre-flight planning, would result in a reliable launch and recovery.

Launch Plan
The time it took to research, design, and build the first Doge led to an unfortunate launch time and location - November in New Hampshire, a cold and windy first space launch. Launch Day was to be November 28th, 2014 with a targeted landing zone of Mt. Kearsarge State Park in New Hampshire. We picked that landing zone because it is a rural area where we would be less likely to hit someone's property, it has enough roads and hiking trails that we could get wherever we needed fairly quickly for recovery, and the mountain had a cell tower on top, ensuring a strong cell signal in the area to get a location text message back from the Doge.
During the days leading up to the launch, a major winter storm had hit the area and knocked out power to the majority of New England, adding more uncertainty to the launch. The Doge was theoretically capable of flying in all weather, it looked as if we may be putting that to a real test. A pre-launch analysis was done to find the launch point that would result in an impact at Mt. Kearsarge – Ludlow, Vermont

Jumping out of the car into 10 degree temperatures we set immediately to work. We had done a lot of thinking about what needed to be done and put together a pre-launch plan but as many know, no plan survives first contact.
The first problem we encountered was not understanding how the pressure regulator worked. We had assumed that once you turn the gas on that it would start flowing into the attached balloon, in reality we were not provided a scientific pressure regulator but a party balloon pressure regulator. As we troubleshot what was preventing the gas from flowing we inadvertently destroyed our filling system. Once we figured out how to get the helium flowing (hint if you’re ever using this kind of regulator – bend the plastic protrusion to open the fill valve), we began filling the balloon at the maximum rate.
We encountered a second problem: our research indicated that filling the balloon would take 30 minutes – in reality it took 5! Those extra 25 minutes were intended to prep the remainder of the payload and get the telemetry system working and validated. I rushed around tying strings, shaking hand warmers to activate, and enabled the telemetry system, all while a 5 foot diameter, fragile balloon was blowing around in 10 degree winds.
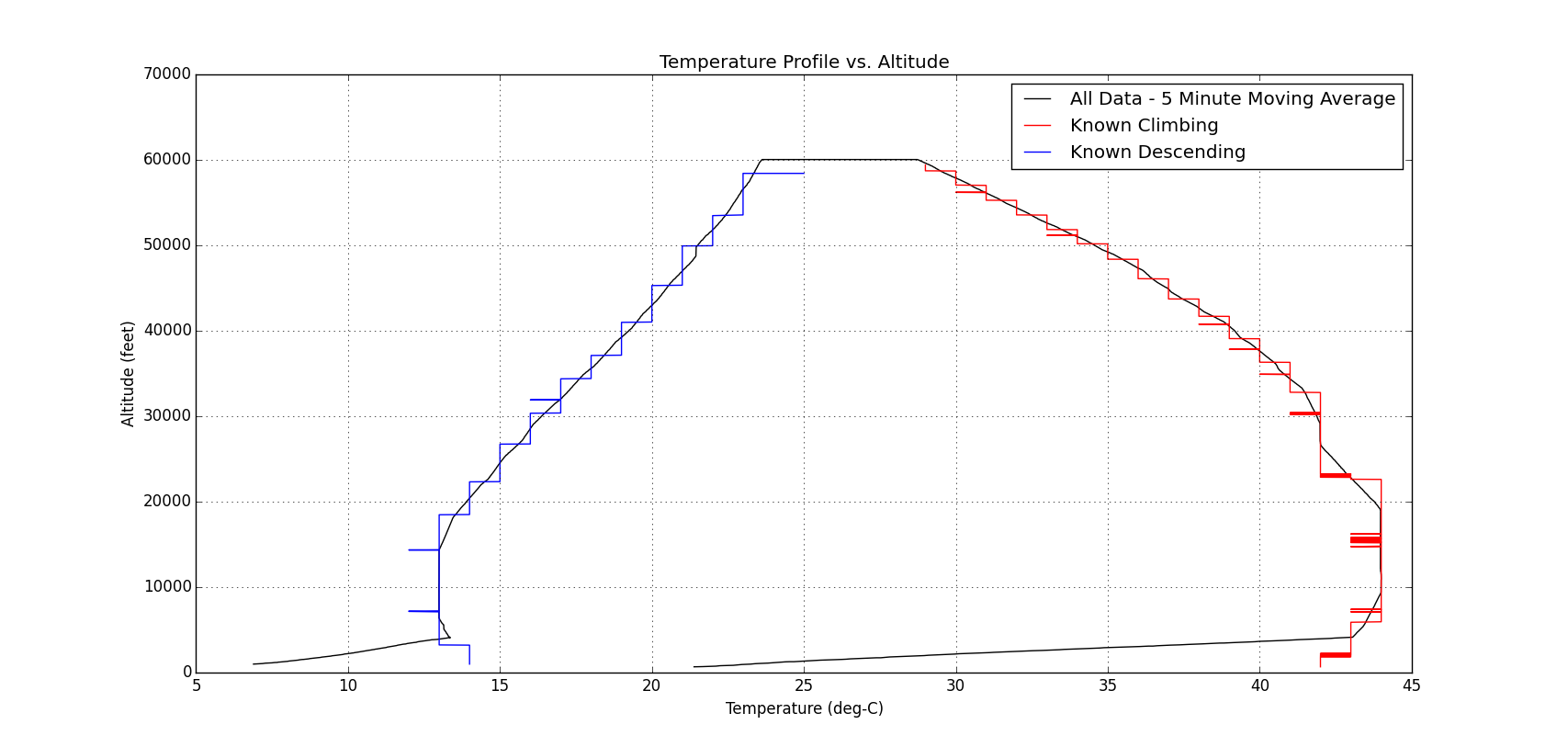
There is an old adage that says that things happen in threes… well this launch fell into that category. Problem three - in ballooning, few numbers are more important than ‘Free Lift’. Free lift is defined as the total lift produced by the helium minus the weight of the payload. This number drives how fast a balloon will climb through the atmosphere which directly relates to how far it will go over the ground. We had planned for a free lift of around 3.5 pounds and what we measured was actually 0.6 pounds – the Doge could barely pull itself off the ground.
This was a major problem – all of our preflight work was out the door and there was no way we were going to hit Mt. Kearsarge. There we stood, a Doge fully primed and ready blowing in the freezing wind and having to make a launch or abort decision. After weighing our options, we decided what the heck - we were there, we were ready, and we needed some practical experience and data. Throw caution to the wind, its time to fly!
Launch Log
0 minutes - It's flying, it works!! The balloon slowly rose into the sky, with the payload swaying underneath as it rose through the winds. After barely clearing a hill, it rose out of sight as we packed. So begins the chase.
https://www.youtube.com/watch?v=LU2TTTHtn3E
10 minutes - a quick stop for a warm up coffee allowed us a first look at telemetry being sent from the balloon. My eager excitement quickly turned into shock – the balloon was not rising at the predicted 15 miles per hour, but at an anemic 3 miles per hour. Seeing as it needed to get at least 10 miles high to burst, that put the minimum climb time at around 3.5 hours, 4.5 hours if we included the descent. We all looked at each other and instantly had the same conclusion: “She’s going into the ocean”.
30 minutes - a telemetry update showed that DS-1 was about to enter New Hampshire - we were about to have an inter-state spacecraft! The balloon was barely crossing through 10,000 feet at its steady 3 miles per hour climb.
50 minutes - we have had radio silence for quite some time, but knew that the original prediction should have the balloon at roughly its peak altitude of 75,000 feet. We got a sudden, single telemetry message – it was at 15,000 feet and 20 miles south of Mount Kearsarge, the planned landing point, and still climbing! This spacecraft was quickly heading for a watery demise in the cold north Atlantic Ocean. An updated prediction indicated a flight over Manchester, NH and the recovery team was once again re-dispatched.
90 minutes - after yet another period of silence, an unfortunate message was received. The balloon was at 27,000 feet over Manchester, travelling at 60 mph in level flight. We had what the weather balloon community calls a ‘floater’, a balloon that is neutrally buoyant and will not longer climb or descend. One final prediction showed that the balloon would pass over Glouster, MA as it cruised out to sea, heading for the Atlantic Grand Banks. This confirmed our initial assumptions from the coffee shop – DogeShip-One is heading for the drink.
130 minutes - This was the time that she was predicted to cross over the coast and head into the Atlantic. We still had not heard a thing from the Doge since the last update over Manchester. We were all hoping for a miracle reporting the Doge on the ground near the coast, but that was just wishful thinking. We concluded that the Doge was lost, to be found one day by a mariner or a kid in Nova Scotia as a message in a bottle. Perhaps one day we will get an email on our recovery address from somewhere in the world about a found Doge!

Conclusions
The frigid launch of our first weather balloon was a massive learning experience. We had gone into it with high hopes, but the expectation that there was a pretty good chance we would not get the balloon back. Our main intention was to put a stick in the ground, establish what we knew and understood, and what we needed to learn more about.
A thorough post-flight analysis was done using what data we had available to understand what happened to cause the launch to go so wrong. That information largely informed the improvements made before the second, mostly successful, launch a month later - DogeShip 2. A subsequent post will be made in the near future about the post-flight analysis that we did, and the new information gained that led us to successful follow-up flights!
Thanks to Alyssa, Sarah, and David for the assistance!